員體系")
")























研究人員開發(fā)全3D打印執(zhí)行器,以構(gòu)建類似水母的軟機(jī)器人
魔猴君 行業(yè)資訊 1491天前
日本山形大學(xué)的研究人員已經(jīng)開發(fā)出了全3D打印執(zhí)行器,該執(zhí)行器可以構(gòu)成類似水母的軟機(jī)器人的基礎(chǔ)。使用基于紫外線的3D打印機(jī),該團(tuán)隊(duì)能夠?qū)⑿潞铣傻牧W与p網(wǎng)絡(luò)(P-DN)水凝膠固化成一種與月水母的肌肉相似的收縮機(jī)制。基于他們新穎的設(shè)備,科學(xué)家們現(xiàn)在打算創(chuàng)建一個(gè)具有潛在海洋野生動(dòng)植物監(jiān)測(cè)應(yīng)用的整個(gè)水生機(jī)器人。

一群月亮水母。科學(xué)家發(fā)現(xiàn)他們的致動(dòng)器以類似于月水母的肌肉的方式收縮。
圖片來自Kiara Sztankovics,Unsplash。
水生機(jī)器人的生態(tài)效益
開發(fā)能夠模仿其有機(jī)對(duì)應(yīng)物行為的軟機(jī)器人的好處不僅僅在于新穎性價(jià)值。先進(jìn)的設(shè)備具有與人類一起工作,進(jìn)入災(zāi)難管理,海洋保護(hù)甚至醫(yī)療保健應(yīng)用中我們無法做到的地方的潛力。這種機(jī)器人在水下具有特殊的前景,在那里他們可以收集有關(guān)海洋的更多信息,并有助于進(jìn)一步實(shí)現(xiàn)聯(lián)合國的可持續(xù)發(fā)展目標(biāo)(SDG)。達(dá)到此目的的最佳方法之一是創(chuàng)建模仿天然動(dòng)物運(yùn)動(dòng)的柔軟材料,但到目前為止,即使是3D打印的章魚風(fēng)格機(jī)器人都具有金屬體,有可能使它們對(duì)海洋生物造成破壞。
盡管許多現(xiàn)有的漫游器都由硅橡膠制成的“腿”作為動(dòng)力,但水凝膠卻是一種侵入性較小的替代方案,因?yàn)樗鼈円呀?jīng)由大約90%的水組成。這種成分也與在水母中自然看到的成分相似,與其他水生生物相比,其操作所需的能量要少得多,有可能使它們成為海洋友好型監(jiān)視機(jī)器人的理想基礎(chǔ)。
日本科學(xué)家使用UV 3D打印機(jī)制造了五個(gè)凝膠致動(dòng)器原型。圖片來自ECS固態(tài)科學(xué)與技術(shù)雜志。
構(gòu)造新型執(zhí)行器
在Yamagata團(tuán)隊(duì)開始3D打印其執(zhí)行器之前,他們合成了一種新型的交聯(lián)P-DN水凝膠,該凝膠由硬而脆的第一聚合物和較軟的第二層組成。該材料的特點(diǎn)是高含水率,增強(qiáng)的強(qiáng)度和出色的可印刷性,為它們的裝置形成了堅(jiān)實(shí)而易延展的基礎(chǔ)。
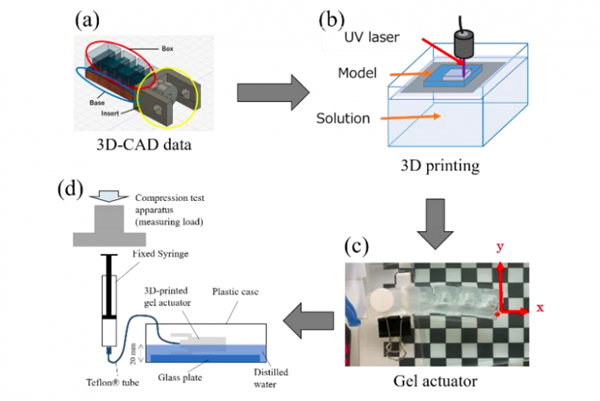
準(zhǔn)備好配方后,科學(xué)家們使用基于UV的3D打印機(jī)將其聚合成三個(gè)獨(dú)立的部分:連接器,底座和盒子。從理論上講,“底座”和“盒子”設(shè)計(jì)為通過注入空氣而變形,從而產(chǎn)生提供推進(jìn)所需的收縮,而“連接器”僅將硅樹脂管固定在執(zhí)行器的主體上。為了進(jìn)行測(cè)試,該小組3D打印了五個(gè)不同的原型,發(fā)現(xiàn)該凝膠的彈性與所用單體的類型緊密相關(guān),并且達(dá)到了交聯(lián)的水平。同樣,執(zhí)行器的生產(chǎn)寬度為0.4-0.5 mm,因?yàn)檩^厚的層會(huì)出現(xiàn)膨脹,從而導(dǎo)致零件不一致。
在壓縮測(cè)試中,通過管道將空氣注入執(zhí)行機(jī)構(gòu),科學(xué)家發(fā)現(xiàn)他們能夠通過調(diào)節(jié)其組成部件的彈性模量來控制其變形。該設(shè)備還顯示出與扁圓月水母相同的收縮率,可能使其成為完整機(jī)器人復(fù)制品的理想基礎(chǔ)。將來,研究人員認(rèn)為,完善執(zhí)行器壁厚與其軌跡之間的關(guān)系,將是開發(fā)改進(jìn)的設(shè)備迭代的關(guān)鍵。目前,Yamagata團(tuán)隊(duì)打算將其執(zhí)行器集成到一個(gè)新穎的以水母為靈感的機(jī)器人中,最終目的是在海洋保護(hù)應(yīng)用中使用它。
受動(dòng)物啟發(fā)的軟機(jī)器人
盡管用于環(huán)境監(jiān)控的3D打印機(jī)器人是一項(xiàng)相當(dāng)高尚的工作,但它絕不是一種新穎的機(jī)器人,并且最近還開發(fā)了幾種類似的機(jī)器人。
佛羅里達(dá)大西洋大學(xué)(FAU)和美國海軍研究辦公室的科學(xué)家開發(fā)了3D打印的軟機(jī)器人水母,能夠監(jiān)測(cè)脆弱的珊瑚礁。該設(shè)備由八個(gè)液壓執(zhí)行器組成,這些執(zhí)行器經(jīng)過專門設(shè)計(jì),不會(huì)損壞脆弱的生物生態(tài)系統(tǒng)。
同樣,哈佛大學(xué)的一個(gè)團(tuán)隊(duì)創(chuàng)造了“ Octobot” 3D打印自主軟件機(jī)器人。像Yamagata團(tuán)隊(duì)的執(zhí)行器一樣,Octobot是基于氣動(dòng)的,但是它不使用氧氣而是將少量的液體燃料轉(zhuǎn)化為氣體,從而像氣球一樣使手臂膨脹。
軟機(jī)器人也具有重要的陸上監(jiān)視應(yīng)用程序,佐治亞理工學(xué)院的工程師已經(jīng)創(chuàng)建了3D打印的“ Slothbot”,用于在亞特蘭大植物園照顧野生動(dòng)物。 該設(shè)備沿著樹木之間的電纜移動(dòng),以觀察下面生境的溫度,天氣和二氧化碳水平。
來源:https://www.3ddayin.net/xinwenpindao/guowaikuaidi/40076.html
3D模型是否是實(shí)體模型?")

3D打印材料屬性一覽表")
3D打印用模型文件?")
合作")
精華文章合集,你想知道的3D打印知識(shí)都在這里!")
保護(hù)聲明")

據(jù)格式")
")