天津研究人員開發出全3D打印模塊化管道維護軟機器人
魔猴君 行業資訊 1547天前
中國天津大學的科學家已經3D打印了可自定義的機器人,該機器人能夠實時縮放和監視工業設施中的管道。單件式設備具有一系列軟彎曲機制和模塊化抓手,使其可以靈活地爬升奇形怪狀的基礎設施。由于管道中斷通常會導致生產延誤,而且許多公司仍在手動檢查它們,因此該團隊的漫游器可以代表一種新的,更有效的替代方案。
該小組的3D打印機器人(如圖)可以減少對工業設施進行手動管道檢查的需要。
通過IEEE Robotics and Automation期刊獲得Gif。
爬行檢查管道
在許多工廠中,管道是工業效率以及最終的生產生產力所依賴的重要基礎。即使很小的破損也會對生產造成重大破壞,因此,對于許多大型企業而言,不斷檢查泄漏情況已成為必需。當前,工業公司傾向于使用人員手動監視其管道,但是這種方法既勞動強度大,又具有潛在的危險,尤其是在管道中攜帶危險化學品的情況下。結果,可以承擔這種危險任務的機器人的開發已成為重要的研究領域。
盡管先前的研究已經提出了一系列機器人解決方案,但它們往往是內部或外部爬管設備,而不是兩者兼具。更重要的是,前者需要關閉運輸網絡才能正常工作,對于埋在地下的管道,無法通過從外部進行維護來避免這種情況。
但是,隨著軟機器人技術的最新發展,制造復雜的設備變得更加容易,尤其是與使用成型的復雜性相比。因此,通過采用3D打印,天津團隊能夠創建一種優化的設備,該設備能夠比以前更靈活地檢查管道。
科學家的3D打印機器人(如圖)具有模塊化設計,使其能夠適應特定的應用。
照片通過IEEE機器人與自動化期刊拍攝。
天津團隊的3D打印設計
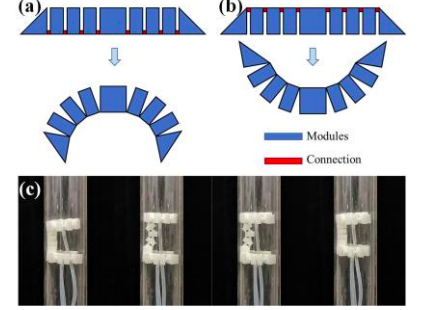
為了最大程度地提高機器人的靈活性,科學家設計了一種一體式軟彎曲機制,該機制能夠承受高水平的變形。使用CAD軟件創建設備還使其易于升級,并使團隊能夠隨意添加模塊或調整其夾具的直徑。
該機器人的布局包括一個中間部分,兩端各有一個抓爪,以及三個進氣管,可以對其進行控制并按需施加壓力。通過交替對設備的夾具進行加壓和減壓,即使在他們的直接控制下,科學家也能夠執行“爬升”動作。在測試過程中,機器人顯示出85 Nmm的扭矩輸出,足以以14 mm p / s的速度爬升直徑16-38 mm的管道。該設備還能夠按45°和90°的角度縮放丙烯酸網絡,這可能使其成為檢查可能難以導航的傾斜管道的理想選擇。
鑒于他們的機器人被證明能夠在內部和外部進行攀爬,并可以在縱向或橫向旋轉,該團隊認為這是對現有設計的升級。將來,科學家打算將傳感器集成到他們的設備中,使其成為一種自主的管道維護解決方案。
與3D打印的軟機器人“同行”
由于3D打印提供的設計靈活性,越來越多的研究人員已經能夠生產出具有創新的機器人,能夠進行先進的行走,攀爬和勻場動作。蔚山國立科學技術研究院(UNIST)的研究人員創建了3D打印的爬壁機器人。受壁虎天生能力的啟發,該團隊的四足機器人甚至能夠在潮濕的地面上結垢。
同樣,UNIST的另一個團隊將3D打印與注塑成型相結合,生產出了一個步行海星形狀的機器人。該設備的五個“肢體”就像生物力學系統中的肌腱一樣,可以被驅動以執行受控的運動。 在其他地方,伊利諾伊大學的科學家將老鼠的脊髓融合到軟機器人中,從而將生物物質整合到他們的設計中,從而創建了3D打印的步行微型機器人。這種生物機器人由脊柱中的圖案化肌肉收縮提供動力,從而反過來移動其“腳”。
來源:https://www.3ddayin.net/xinwenpindao/guoneidongtai/39929.html









")