首爾科學家3D打印多功能軟件傳感器可實現人機交互
魔猴君 行業資訊 1496天前
首爾國立大學(SNU)的研究人員開發了新穎的3D打印傳感器,使人類能夠與變形的軟機器人系統進行遠程交互。事實證明,該多功能設備能夠隨意拉伸和彎曲成復雜的形狀,它還具有光學,微流體和壓阻傳感功能。在測試期間,該團隊能夠將其傳感器集成到可穿戴和激勵驅動的執行器中,從而使用戶可以遠距離控制多個機器人設備。
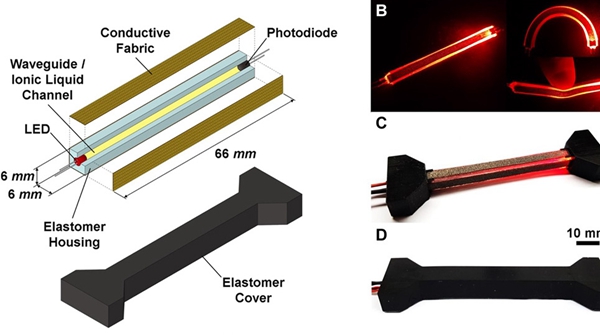
研究人員能夠將其3D打印傳感器(如圖所示)集成到多個軟機器人設備中。圖片來自《科學機器人》雜志。
使軟機器人更加敏感
為了使機器人系統與環境和人類更具交互性,科學家已經進行了大量研究。最初,這些研究集中在能夠對輸入(例如電阻或光強度)做出響應的傳感器上,但是許多傳感器一次只能檢測一種變形模式。盡管微流體和織物設備在這一領域已顯示出希望,但它們只能區分一個傳感元件,因此無法區分不同類型。考慮到單個刺激可以引起多個變形響應,因此仍然非常需要創建一種更具適應性的軟傳感器。
已經采取了多種方法來創建多模式機器人,包括將流體通道或傳感元件嵌入彈性體結構中。然而,將傳感器物理地組合成一個結構經常影響它們的尺寸,并增加了設計和制造過程的復雜性。
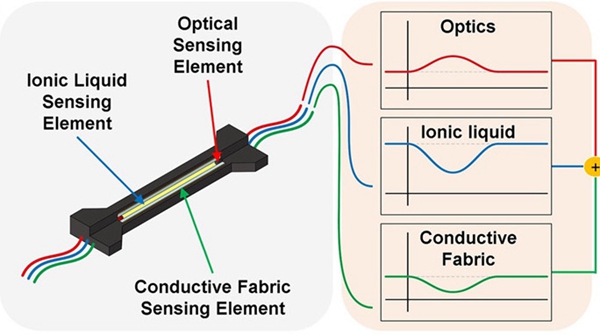
使用3D打印,科學家們能夠將三個不同的傳感元件集成到一個設備中(如圖所示)。圖片來自《科學機器人》雜志。
團隊的新型多模式傳感器
為了克服先前項目的局限性,團隊3D打印了一個多功能傳感器,該傳感器能夠檢測單個變形模式并立即將它們全部解耦。該設備本身具有微流體通道,該通道中充滿了離子液體,彈性外殼和導電織物層。從理論上講,當團隊的設計發生變形時,其通道將充當傳感器并改變其電阻。為了將其付諸實踐,研究人員將他們的設備置于不同的力下,并在模擬過程中部署了機器學習技術以測量其多峰能力。
在施加局部接觸壓力之前,將傳感器從旋轉接頭的中性軸彎曲,以模擬拉伸,壓縮和彎曲。結果表明,設備信號的靈敏度隨施加壓力的位置而變化,表明它可能對外部刺激產生反應。為了證明他們的傳感器在人機界面中的潛力,科學家構建了兩個原型系統。一種是可穿戴設備,使用戶能夠精確控制無人機和機械臂,而另一種則是由四個執行器組成的軟機器人“手腕”,可以對外力產生反作用。
盡管該團隊承認需要進行進一步的測試以消除手動生產步驟,但與其他設計相比,他們認為自己的設備是向前邁出的重要一步。未來,科學家們相信他們的傳感器可以應用于大型機器人中,從而為他們提供多達十種不同的傳感功能。
軟機器人技術的進步
研究人員正越來越多地采用3D打印技術,以制造具有更復雜設計和高級功能(從感覺到走路到“出汗”)的軟機器人。來自浙江工業大學,天津大學,南京理工大學和立命館大學的科學家已經開發出3D打印的軟機器人手指。該團隊生產了他們的加法數字,以證明可以采用多種材料制造來簡化機器人生產過程。同時,康奈爾大學的研究人員用3D打印了一條柔軟的機器人肌肉,該肌肉可以通過汗水控制內部溫度。柔軟的手指狀致動器可以使不受束縛的機器人長時間運行而不會過熱。
在其他地方,加利福尼亞大學圣地亞哥分校的一個團隊已部署增材制造,以生產步行昆蟲啟發的機器人。 精打細算的機器人旨在降低尋求進入該領域的愛好者和研究人員的進入成本。
來源:https://www.3ddayin.net/xinwenpindao/guowaikuaidi/39883.html









")